This is a glossary for the terminology applied in the mathematical theories of Lie groups and Lie algebras . For the topics in the representation theory of Lie groups and Lie algebras, see Glossary of representation theory . Because of the lack of other options, the glossary also includes some generalizations such as quantum group .
Notations :
Throughout the glossary,
(
⋅
,
⋅
)
{\displaystyle (\cdot ,\cdot )}
inner product of a Euclidean space E and
⟨
⋅
,
⋅
⟩
{\displaystyle \langle \cdot ,\cdot \rangle }
⟨
β
,
α
⟩
=
(
β
,
α
)
(
α
,
α
)
∀
α
,
β
∈
E
.
{\displaystyle \langle \beta ,\alpha \rangle ={\frac {(\beta ,\alpha )}{(\alpha ,\alpha )}}\,\forall \alpha ,\beta \in E.}
abelian 1. An abelian Lie group is a Lie group that is an abelian group.
2. An abelian Lie algebra is a Lie algebra such that
[
x
,
y
]
=
0
{\displaystyle [x,y]=0}
x
,
y
{\displaystyle x,y}
adjoint 1. An adjoint representation of a Lie group :
Ad
:
G
→
GL
(
g
)
{\displaystyle \operatorname {Ad} :G\to \operatorname {GL} ({\mathfrak {g}})}
such that
Ad
(
g
)
{\displaystyle \operatorname {Ad} (g)}
c
g
:
G
→
G
,
x
↦
g
x
g
−
1
{\displaystyle c_{g}:G\to G,x\mapsto gxg^{-1}}
2. An adjoint representation of a Lie algebra is a Lie algebra representation
ad
:
g
→
g
l
(
g
)
{\displaystyle {\textrm {ad}}:{\mathfrak {g}}\to {\mathfrak {gl}}({\mathfrak {g}})}
ad
(
x
)
y
=
[
x
,
y
]
{\displaystyle {\textrm {ad}}(x)y=[x,y]}
Ado Ado's theorem : Any finite-dimensional Lie algebra is isomorphic to a subalgebra of
g
l
V
{\displaystyle {\mathfrak {gl}}_{V}}
affine 1. An affine Lie algebra is a particular type of Kac–Moody algebra.
2. An affine Weyl group .
analytic 1. An analytic subgroup
automorphism 1. An automorphism of a Lie algebra is a linear automorphism preserving the bracket.
Cartan 1. Élie Cartan (1869 – 1951), a French mathematician
2. A Cartan subalgebra
h
{\displaystyle {\mathfrak {h}}}
g
{\displaystyle {\mathfrak {g}}}
N
g
(
h
)
=
h
{\displaystyle N_{\mathfrak {g}}({\mathfrak {h}})={\mathfrak {h}}}
3. Cartan criterion for solvability : A Lie algebra
g
{\displaystyle {\mathfrak {g}}}
iff
κ
(
g
,
[
g
,
g
]
)
=
0
{\displaystyle \kappa ({\mathfrak {g}},[{\mathfrak {g}},{\mathfrak {g}}])=0}
4. Cartan criterion for semisimplicity : (1) If
κ
(
⋅
,
⋅
)
{\displaystyle \kappa (\cdot ,\cdot )}
g
{\displaystyle {\mathfrak {g}}}
g
{\displaystyle {\mathfrak {g}}}
F
{\displaystyle F}
κ
(
⋅
,
⋅
)
{\displaystyle \kappa (\cdot ,\cdot )}
5. The Cartan matrix of the root system
Φ
{\displaystyle \Phi }
(
⟨
α
i
,
α
j
⟩
)
i
,
j
=
1
n
{\displaystyle (\langle \alpha _{i},\alpha _{j}\rangle )_{i,j=1}^{n}}
Δ
=
{
α
1
…
α
n
}
{\displaystyle \Delta =\{\alpha _{1}\ldots \alpha _{n}\}}
Φ
{\displaystyle \Phi }
6. Cartan subgroup
7. Cartan decomposition
Casimir Casimir invariant , a distinguished element of a universal enveloping algebra.Clebsch–Gordan coefficients Clebsch–Gordan coefficients center 2. The centralizer of a subset
X
{\displaystyle X}
g
{\displaystyle {\mathfrak {g}}}
C
g
(
X
)
:=
{
x
∈
g
|
[
x
,
X
]
=
{
0
}
}
{\displaystyle C_{\mathfrak {g}}(X):=\{x\in {\mathfrak {g}}|[x,X]=\{0\}\}}
center 1. The center of a Lie group is the center of the group.
2. The center of a Lie algebra is the centralizer of itself :
Z
(
L
)
:=
{
x
∈
g
|
[
x
,
g
]
=
0
}
{\displaystyle Z(L):=\{x\in {\mathfrak {g}}|[x,{\mathfrak {g}}]=0\}}
central series 1. A descending central series (or lower central series) is a sequence of ideals of a Lie algebra
L
{\displaystyle L}
C
0
(
L
)
=
L
,
C
1
(
L
)
=
[
L
,
L
]
,
C
n
+
1
(
L
)
=
[
L
,
C
n
(
L
)
]
{\displaystyle C^{0}(L)=L,\,C^{1}(L)=[L,L],\,C^{n+1}(L)=[L,C^{n}(L)]}
2. An ascending central series (or upper central series) is a sequence of ideals of a Lie algebra
L
{\displaystyle L}
C
0
(
L
)
=
{
0
}
,
C
1
(
L
)
=
Z
(
L
)
{\displaystyle C_{0}(L)=\{0\},\,C_{1}(L)=Z(L)}
C
n
+
1
(
L
)
=
π
n
−
1
(
Z
(
L
/
C
n
(
L
)
)
)
{\displaystyle C_{n+1}(L)=\pi _{n}^{-1}(Z(L/C_{n}(L)))}
π
i
{\displaystyle \pi _{i}}
L
→
L
/
C
n
(
L
)
{\displaystyle L\to L/C_{n}(L)}
Chevalley 1. Claude Chevalley (1909 – 1984), a French mathematician
2. A Chevalley basis is a basis constructed by Claude Chevalley with the property that all structure constants are integers. Chevalley used these bases to construct analogues of Lie groups over finite fields , called Chevalley groups .
complex reflection group complex reflection group coroot coroot Coxeter 1. H. S. M. Coxeter (1907 – 2003), a British-born Canadian geometer
2. Coxeter group
3. Coxeter number
derived algebra 1. The derived algebra of a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
[
g
,
g
]
{\displaystyle [{\mathfrak {g}},{\mathfrak {g}}]}
2. A derived series is a sequence of ideals of a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
D
0
g
=
g
,
D
n
g
=
D
n
−
1
g
{\displaystyle D^{0}{\mathfrak {g}}={\mathfrak {g}},D^{n}{\mathfrak {g}}=D^{n-1}{\mathfrak {g}}}
Dynkin 1. Eugene Borisovich Dynkin (1924 – 2014), a Soviet and American mathematician
2. Dynkin diagrams Dynkin diagrams .
extension An exact sequence
0
→
g
′
→
g
→
g
″
→
0
{\displaystyle 0\to {\mathfrak {g}}'\to {\mathfrak {g}}\to {\mathfrak {g}}''\to 0}
g
{\displaystyle {\mathfrak {g}}}
Lie algebra extension of
g
″
{\displaystyle {\mathfrak {g}}''}
g
′
{\displaystyle {\mathfrak {g}}'}
exponential map The exponential map for a Lie group G with
g
{\displaystyle {\mathfrak {g}}}
g
→
G
{\displaystyle {\mathfrak {g}}\to G}
exponential E6 , E7 , E7½ , E8 , En , Exceptional Lie algebra
homomorphism 1. A Lie group homomorphism is a group homomorphism that is also a smooth map.
2. A Lie algebra homomorphism is a linear map
ϕ
:
g
1
→
g
2
{\displaystyle \phi :{\mathfrak {g}}_{1}\to {\mathfrak {g}}_{2}}
ϕ
(
[
x
,
y
]
)
=
[
ϕ
(
x
)
,
ϕ
(
y
)
]
∀
x
,
y
∈
g
1
.
{\displaystyle \phi ([x,y])=[\phi (x),\phi (y)]\,\forall x,y\in {\mathfrak {g}}_{1}.}
Harish-Chandra 1. Harish-Chandra , (1923 – 1983), an Indian American mathematician and physicist
2. Harish-Chandra homomorphism
3. Harish-Chandra isomorphism
highest 1. The theorem of the highest weight , stating the highest weights classify the irreducible representations.
2. highest weight
3. highest weight module
ideal An ideal of a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
g
′
{\displaystyle {\mathfrak {g'}}}
[
g
′
,
g
]
⊆
g
′
.
{\displaystyle [{\mathfrak {g'}},{\mathfrak {g}}]\subseteq {\mathfrak {g'}}.}
index Index of a Lie algebra invariant convex cone An invariant convex cone is a closed convex cone in the Lie algebra of a connected Lie group that is invariant under inner automorphisms.
Iwasawa decomposition Iwasawa decomposition
Jacobi identity 1. Carl Gustav Jacob Jacobi Carl Gustav Jacob Jacobi (1804 – 1851), a German mathematician.
2. Given a binary operation
[
⋅
,
⋅
]
:
V
2
→
V
{\displaystyle [\cdot ,\,\cdot ]:V^{2}\to V}
Jacobi identity states: [[x , y ], z ] + [[y , z ], x ] + [[z , x ], y ] = 0.
Kac–Moody algebra Kac–Moody algebra Killing 1. Wilhelm Killing (1847 – 1923), a German mathematician.
2. The Killing form on a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
κ
(
x
,
y
)
:=
Tr
(
ad
x
ad
y
)
∀
x
,
y
∈
g
{\displaystyle \kappa (x,y):={\textrm {Tr}}({\textrm {ad}}\,x\,{\textrm {ad}}\,y)\ \forall x,y\in {\mathfrak {g}}}
Kirillov Kirillov character formula
Langlands Langlands decomposition Langlands dual Lie 1. Sophus Lie Sophus Lie (1842 – 1899), a Norwegian mathematician
2. A Lie group is a group that has a compatible structure of a smooth manifold.
3. A Lie algebra is a vector space
g
{\displaystyle {\mathfrak {g}}}
F
{\displaystyle F}
Lie bracket or abbr. bracket ) , which satisfies the following conditions:
∀
a
,
b
∈
F
,
x
,
y
,
z
∈
g
{\displaystyle \forall a,b\in F,x,y,z\in {\mathfrak {g}}}
[
a
x
+
b
y
,
z
]
=
a
[
x
,
z
]
+
b
[
y
,
z
]
{\displaystyle [ax+by,z]=a[x,z]+b[y,z]}
bilinearity )
[
x
,
x
]
=
0
{\displaystyle [x,x]=0}
alternating )
[
[
x
,
y
]
,
z
]
+
[
[
y
,
z
]
,
x
]
+
[
[
z
,
x
]
,
y
]
=
0
{\displaystyle [[x,y],z]+[[y,z],x]+[[z,x],y]=0}
Jacobi identity )
4. Lie group–Lie algebra correspondence
5. Lie's theorem
Let
g
{\displaystyle {\mathfrak {g}}}
solvable Lie algebra over algebraically closed field of characteristic
0
{\displaystyle 0}
V
{\displaystyle V}
representation of
g
{\displaystyle {\mathfrak {g}}}
V
{\displaystyle V}
eigenvector for all elements of
g
{\displaystyle {\mathfrak {g}}}
6. Compact Lie group .
7. Semisimple Lie group ; see #semisimple .
Levi Levi decomposition
nilpotent 1. A nilpotent Lie group .
2. A nilpotent Lie algebra is a Lie algebra that is nilpotent as an ideal; i.e., some power is zero:
[
g
,
[
g
,
[
g
,
…
,
[
g
,
g
]
…
]
]
]
=
0
{\displaystyle [{\mathfrak {g}},[{\mathfrak {g}},[{\mathfrak {g}},\dots ,[{\mathfrak {g}},{\mathfrak {g}}]\dots ]]]=0}
3. A nilpotent element of a semisimple Lie algebra[ 1] x such that the adjoint endomorphism
a
d
x
{\displaystyle ad_{x}}
4. A nilpotent cone
normalizer The normalizer of a subspace
K
{\displaystyle K}
g
{\displaystyle {\mathfrak {g}}}
N
g
(
K
)
:=
{
x
∈
g
|
[
x
,
K
]
⊆
K
}
{\displaystyle N_{\mathfrak {g}}(K):=\{x\in {\mathfrak {g}}|[x,K]\subseteq K\}}
radical 1. The radical of a Lie group .
2. The radical of a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
g
{\displaystyle {\mathfrak {g}}}
real real form .reductive 1. A reductive group .
2. A reductive Lie algebra .
reflection A reflection group , a group generated by reflections.
regular 1. A regular element of a Lie algebra .
2. A regular element with respect to a root system.
Let
Φ
{\displaystyle \Phi }
γ
∈
E
{\displaystyle \gamma \in E}
(
γ
,
α
)
≠
0
∀
γ
∈
Φ
{\displaystyle (\gamma ,\alpha )\neq 0\,\forall \gamma \in \Phi }
For each set of simple roots
Δ
{\displaystyle \Delta }
Φ
{\displaystyle \Phi }
γ
∈
E
{\displaystyle \gamma \in E}
(
γ
,
α
)
>
0
∀
γ
∈
Δ
{\displaystyle (\gamma ,\alpha )>0\,\forall \gamma \in \Delta }
γ
{\displaystyle \gamma }
Δ
(
γ
)
{\displaystyle \Delta (\gamma )}
Δ
=
Δ
(
γ
)
{\displaystyle \Delta =\Delta (\gamma )}
Φ
+
(
γ
)
=
{
α
∈
Φ
|
(
α
,
γ
)
>
0
}
{\displaystyle \Phi ^{+}(\gamma )=\{\alpha \in \Phi |(\alpha ,\gamma )>0\}}
α
{\displaystyle \alpha }
Φ
+
(
γ
)
{\displaystyle \Phi ^{+}(\gamma )}
α
=
α
′
+
α
″
{\displaystyle \alpha =\alpha '+\alpha ''}
α
′
,
α
″
∈
Φ
+
(
γ
)
{\displaystyle \alpha ',\alpha ''\in \Phi ^{+}(\gamma )}
Δ
(
γ
)
{\displaystyle \Delta (\gamma )}
Φ
+
(
γ
)
{\displaystyle \Phi ^{+}(\gamma )}
root 1. root of a semisimple Lie algebra :
Let
g
{\displaystyle {\mathfrak {g}}}
h
{\displaystyle {\mathfrak {h}}}
g
{\displaystyle {\mathfrak {g}}}
α
∈
h
∗
{\displaystyle \alpha \in {\mathfrak {h}}^{*}}
g
α
:=
{
x
∈
g
|
[
h
,
x
]
=
α
(
h
)
x
∀
h
∈
h
}
{\displaystyle {\mathfrak {g_{\alpha }}}:=\{x\in {\mathfrak {g}}|[h,x]=\alpha (h)x\,\forall h\in {\mathfrak {h}}\}}
α
{\displaystyle \alpha }
g
{\displaystyle {\mathfrak {g}}}
g
α
≠
{
0
}
{\displaystyle {\mathfrak {g_{\alpha }}}\neq \{0\}}
The set of all roots is denoted by
Φ
{\displaystyle \Phi }
2. Root system
A subset
Φ
{\displaystyle \Phi }
E
{\displaystyle E}
Φ
{\displaystyle \Phi }
span
(
Φ
)
=
E
{\displaystyle {\textrm {span}}(\Phi )=E}
0
∉
Φ
{\displaystyle 0\notin \Phi }
For all
α
∈
Φ
{\displaystyle \alpha \in \Phi }
c
∈
R
{\displaystyle c\in \mathbb {R} }
c
α
∈
Φ
{\displaystyle c\alpha \in \Phi }
c
=
±
1
{\displaystyle c=\pm 1}
For all
α
,
β
∈
Φ
{\displaystyle \alpha ,\beta \in \Phi }
⟨
α
,
β
⟩
{\displaystyle \langle \alpha ,\beta \rangle }
For all
α
,
β
∈
Φ
{\displaystyle \alpha ,\beta \in \Phi }
S
α
(
β
)
∈
Φ
{\displaystyle S_{\alpha }(\beta )\in \Phi }
S
α
{\displaystyle S_{\alpha }}
α
{\displaystyle \alpha }
S
α
(
x
)
=
x
−
⟨
x
,
α
⟩
α
{\displaystyle S_{\alpha }(x)=x-\langle x,\alpha \rangle \alpha }
3. Root datum
4. Positive root of root system
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
5. Negative root of root system
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
6. long root
7. short root
8. inverse of a root system: Given a root system
Φ
{\displaystyle \Phi }
α
v
=
2
α
(
α
,
α
)
{\displaystyle \alpha ^{v}={\frac {2\alpha }{(\alpha ,\alpha )}}}
Φ
v
=
{
α
v
|
α
∈
Φ
}
{\displaystyle \Phi ^{v}=\{\alpha ^{v}|\alpha \in \Phi \}}
Φ
v
{\displaystyle \Phi ^{v}}
Φ
{\displaystyle \Phi }
9. base of a root system: synonymous to "set of simple roots"
10. dual of a root system: synonymous to "inverse of a root system"
Serre Serre's theorem states that, given a (finite reduced) root system
Φ
{\displaystyle \Phi }
Φ
{\displaystyle \Phi }
simple 1. A simple Lie group is a connected Lie group that is not abelian which does not have nontrivial connected normal subgroups.
2. A simple Lie algebra is a Lie algebra that is non abelian and has only two ideals, itself and
{
0
}
{\displaystyle \{0\}}
3. simply laced group (a simple Lie group is simply laced when its Dynkin diagram is without multiple edges).
4. simple root . A subset
Δ
{\displaystyle \Delta }
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
E
{\displaystyle E}
Each element of
Φ
{\displaystyle \Phi }
Δ
{\displaystyle \Delta }
5. Classification of simple Lie algebras
Classical Lie algebras :
Special linear algebra
A
l
(
l
≥
1
)
{\displaystyle A_{l}\ (l\geq 1)}
l
2
+
2
l
{\displaystyle l^{2}+2l}
s
l
(
l
+
1
,
F
)
=
{
x
∈
g
l
(
l
+
1
,
F
)
|
T
r
(
x
)
=
0
}
{\displaystyle {\mathfrak {sl}}(l+1,F)=\{x\in {\mathfrak {gl}}(l+1,F)|Tr(x)=0\}}
traceless matrices)
Orthogonal algebra
B
l
(
l
≥
1
)
{\displaystyle B_{l}\ (l\geq 1)}
2
l
2
+
l
{\displaystyle 2l^{2}+l}
o
(
2
l
+
1
,
F
)
=
{
x
∈
g
l
(
2
l
+
1
,
F
)
|
s
x
=
−
x
t
s
,
s
=
(
1
0
0
0
0
I
l
0
I
l
0
)
}
{\displaystyle {\mathfrak {o}}(2l+1,F)=\{x\in {\mathfrak {gl}}(2l+1,F)|sx=-x^{t}s,s={\begin{pmatrix}1&0&0\\0&0&I_{l}\\0&I_{l}&0\end{pmatrix}}\}}
Symplectic algebra
C
l
(
l
≥
2
)
{\displaystyle C_{l}\ (l\geq 2)}
2
l
2
−
l
{\displaystyle 2l^{2}-l}
s
p
(
2
l
,
F
)
=
{
x
∈
g
l
(
2
l
,
F
)
|
s
x
=
−
x
t
s
,
s
=
(
0
I
l
−
I
l
0
)
}
{\displaystyle {\mathfrak {sp}}(2l,F)=\{x\in {\mathfrak {gl}}(2l,F)|sx=-x^{t}s,s={\begin{pmatrix}0&I_{l}\\-I_{l}&0\end{pmatrix}}\}}
Orthogonal algebra
D
l
(
l
≥
1
)
{\displaystyle D_{l}(l\geq 1)}
2
l
2
+
l
{\displaystyle 2l^{2}+l}
o
(
2
l
,
F
)
=
{
x
∈
g
l
(
2
l
,
F
)
|
s
x
=
−
x
t
s
,
s
=
(
0
I
l
I
l
0
)
}
{\displaystyle {\mathfrak {o}}(2l,F)=\{x\in {\mathfrak {gl}}(2l,F)|sx=-x^{t}s,s={\begin{pmatrix}0&I_{l}\\I_{l}&0\end{pmatrix}}\}}
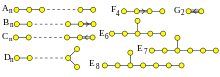
Exceptional Lie algebras :
Root System
dimension
G2
14
F4
52
E6
78
E7
133
E8
248
semisimple 1. A semisimple Lie group
2. A semisimple Lie algebra is a nonzero Lie algebra that has no nonzero abelian ideal.
3. In a semisimple Lie algebra , an element is semisimple if its image under the adjoint representation is semisimple; see Semisimple Lie algebra#Jordan decomposition .
solvable 1. A solvable Lie group
2. A solvable Lie algebra is a Lie algebra
g
{\displaystyle {\mathfrak {g}}}
D
n
g
=
0
{\displaystyle D^{n}{\mathfrak {g}}=0}
n
≥
0
{\displaystyle n\geq 0}
D
g
=
[
g
,
g
]
{\displaystyle D{\mathfrak {g}}=[{\mathfrak {g}},{\mathfrak {g}}]}
g
{\displaystyle {\mathfrak {g}}}
split Stiefel Stiefel diagram of a compact connected Lie group.subalgebra A subspace
g
′
{\displaystyle {\mathfrak {g'}}}
g
{\displaystyle {\mathfrak {g}}}
g
{\displaystyle {\mathfrak {g}}}
[
g
′
,
g
′
]
⊆
g
′
.
{\displaystyle [{\mathfrak {g'}},{\mathfrak {g'}}]\subseteq {\mathfrak {g'}}.}
Weyl 1. Hermann Weyl (1885 – 1955), a German mathematician
2. A Weyl chamber is one of the connected components of the complement in V , a real vector space on which a root system is defined, when the hyperplanes orthogonal to the root vectors are removed.
3. The Weyl character formula gives in closed form the characters of the irreducible complex representations of the simple Lie groups.
4. Weyl group : Weyl group of a root system
Φ
{\displaystyle \Phi }
E
{\displaystyle E}
Φ
{\displaystyle \Phi }
^ Editorial note: the definition of a nilpotent element in a general Lie algebra seems unclear.
Bourbaki, N. (1981), Groupes et Algèbres de Lie , Éléments de Mathématique, Hermann Erdmann, Karin & Wildon, Mark. Introduction to Lie Algebras , 1st edition, Springer, 2006. ISBN 1-84628-040-0 Humphreys, James E. Introduction to Lie Algebras and Representation Theory , Second printing, revised. Graduate Texts in Mathematics, 9. Springer-Verlag, New York, 1978. ISBN 0-387-90053-5
Jacobson, Nathan , Lie algebras , Republication of the 1962 original. Dover Publications, Inc., New York, 1979. ISBN 0-486-63832-4 Kac, Victor (1990). Infinite dimensional Lie algebras Cambridge University Press . ISBN 0-521-46693-8 Claudio Procesi (2007) Lie Groups: an approach through invariants and representation , Springer, ISBN 9780387260402 .Serre, Jean-Pierre (2000), Algèbres de Lie semi-simples complexes Complex Semisimple Lie Algebras ], translated by Jones, G. A., Springer, ISBN 978-3-540-67827-4 J.-P. Serre, "Lie algebras and Lie groups", Benjamin (1965) (Translated from French) 


![{\displaystyle [x,y]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0bb3ac5611c95c794cec85401f417c5e0146185d)





![{\displaystyle {\textrm {ad}}(x)y=[x,y]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2513423903809672d4ce6c41ca033e7eb079aef0)




![{\displaystyle \kappa ({\mathfrak {g}},[{\mathfrak {g}},{\mathfrak {g}}])=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/611f63096ddec38e37f061f5db1ba352945ccb73)






![{\displaystyle C_{\mathfrak {g}}(X):=\{x\in {\mathfrak {g}}|[x,X]=\{0\}\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69e858f87a76e4e0d979ac0a84f75e9e8a7624f1)
![{\displaystyle Z(L):=\{x\in {\mathfrak {g}}|[x,{\mathfrak {g}}]=0\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/17ae3590695b24aa14a0ffd6502a47f991b0c08d)

![{\displaystyle C^{0}(L)=L,\,C^{1}(L)=[L,L],\,C^{n+1}(L)=[L,C^{n}(L)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fb6e252dfdace4a46757a4c3606bddd375a7f2a6)




![{\displaystyle [{\mathfrak {g}},{\mathfrak {g}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9bdae7b3a7c17f4b13b9eea7f88b9a466d2e97aa)







![{\displaystyle \phi ([x,y])=[\phi (x),\phi (y)]\,\forall x,y\in {\mathfrak {g}}_{1}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdf6e8add8d1e9a4d0197b2cc43617cf1e7aa6fc)

![{\displaystyle [{\mathfrak {g'}},{\mathfrak {g}}]\subseteq {\mathfrak {g'}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8a44bf4ad4def3be0c819d1bee99f67e6dfd4f54)


![{\displaystyle [\cdot ,\,\cdot ]:V^{2}\to V}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7baf14b545fcfc50b9a298864ed17f717bce51d1)




![{\displaystyle [ax+by,z]=a[x,z]+b[y,z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7654a168ee84d4b3231619ced5e529fa2eb17ac3)
![{\displaystyle [x,x]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94ccb967db9ab0773c5aa2e0fc234cd33373f193)
![{\displaystyle [[x,y],z]+[[y,z],x]+[[z,x],y]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/95eabacf905ea58f824b3b3da0bfc319b3be2590)


![{\displaystyle [{\mathfrak {g}},[{\mathfrak {g}},[{\mathfrak {g}},\dots ,[{\mathfrak {g}},{\mathfrak {g}}]\dots ]]]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c5f16c3a41309e4c9a17b3aaedbf6ee0d391a08)


![{\displaystyle N_{\mathfrak {g}}(K):=\{x\in {\mathfrak {g}}|[x,K]\subseteq K\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3288e64b108730fceab2bc9f14fe68ca861bfc27)













![{\displaystyle {\mathfrak {g_{\alpha }}}:=\{x\in {\mathfrak {g}}|[h,x]=\alpha (h)x\,\forall h\in {\mathfrak {h}}\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35e2c18b12b973aad2d7649e480c8ae39635f1f1)






























![{\displaystyle D{\mathfrak {g}}=[{\mathfrak {g}},{\mathfrak {g}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d6fd4c85dff63c5be5eca6ae2c2bc8b6cb34407)
![{\displaystyle [{\mathfrak {g'}},{\mathfrak {g'}}]\subseteq {\mathfrak {g'}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b93362411c63816edde3258fb3b94a7b20a9cd0)