In mathematics, the method of steepest descent or saddle-point method is an extension of Laplace's method for approximating an integral, where one deforms a contour integral in the complex plane to pass near a stationary point (saddle point), in roughly the direction of steepest descent or stationary phase. The saddle-point approximation is used with integrals in the complex plane, whereas Laplace’s method is used with real integrals.
The integral to be estimated is often of the form

where C is a contour, and λ is large. One version of the method of steepest descent deforms the contour of integration C into a new path integration C′ so that the following conditions hold:
- C′ passes through one or more zeros of the derivative g′(z),
- the imaginary part of g(z) is constant on C′.
The method of steepest descent was first published by Debye (1909), who used it to estimate Bessel functions and pointed out that it occurred in the unpublished note by Riemann (1863) about hypergeometric functions. The contour of steepest descent has a minimax property, see Fedoryuk (2001). Siegel (1932) described some other unpublished notes of Riemann, where he used this method to derive the Riemann–Siegel formula.
Basic idea
editThe method of steepest descent is a method to approximate a complex integral of the form for large , where and are analytic functions of . Because the integrand is analytic, the contour can be deformed into a new contour without changing the integral. In particular, one seeks a new contour on which the imaginary part, denoted , of is constant ( denotes the real part). Then and the remaining integral can be approximated with other methods like Laplace's method.[1]








![{\displaystyle g(z)=\Re [g(z)]+i\,\Im [g(z)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5919edfce619a0a8aa34c6a26c63b9e44dbf57e)


Etymology
editThe method is called the method of steepest descent because for analytic , constant phase contours are equivalent to steepest descent contours.
If is an analytic function of , it satisfies the Cauchy–Riemann equations Then so contours of constant phase are also contours of steepest descent.




A simple estimate
editLet f, S : Cn → C and C ⊂ Cn. If

where denotes the real part, and there exists a positive real number λ0 such that

then the following estimate holds:[2]

Proof of the simple estimate:

The case of a single non-degenerate saddle point
editBasic notions and notation
editLet x be a complex n-dimensional vector, and

denote the Hessian matrix for a function S(x). If

is a vector function, then its Jacobian matrix is defined as

A non-degenerate saddle point, z0 ∈ Cn, of a holomorphic function S(z) is a critical point of the function (i.e., ∇S(z0) = 0) where the function's Hessian matrix has a non-vanishing determinant (i.e., ).

The following is the main tool for constructing the asymptotics of integrals in the case of a non-degenerate saddle point:
Complex Morse lemma
editThe Morse lemma for real-valued functions generalizes as follows[3] for holomorphic functions: near a non-degenerate saddle point z0 of a holomorphic function S(z), there exist coordinates in terms of which S(z) − S(z0) is exactly quadratic. To make this precise, let S be a holomorphic function with domain W ⊂ Cn, and let z0 in W be a non-degenerate saddle point of S, that is, ∇S(z0) = 0 and . Then there exist neighborhoods U ⊂ W of z0 and V ⊂ Cn of w = 0, and a bijective holomorphic function φ : V → U with φ(0) = z0 such that

Here, the μj are the eigenvalues of the matrix .


The following proof is a straightforward generalization of the proof of the real Morse Lemma, which can be found in.[4] We begin by demonstrating
- Auxiliary statement. Let f : Cn → C be holomorphic in a neighborhood of the origin and f (0) = 0. Then in some neighborhood, there exist functions gi : Cn → C such that where each gi is holomorphic and


From the identity

we conclude that

and

Without loss of generality, we translate the origin to z0, such that z0 = 0 and S(0) = 0. Using the Auxiliary Statement, we have

Since the origin is a saddle point,

we can also apply the Auxiliary Statement to the functions gi(z) and obtain
| (1) |

Recall that an arbitrary matrix A can be represented as a sum of symmetric A(s) and anti-symmetric A(a) matrices,

The contraction of any symmetric matrix B with an arbitrary matrix A is
| (2) |

i.e., the anti-symmetric component of A does not contribute because

Thus, hij(z) in equation (1) can be assumed to be symmetric with respect to the interchange of the indices i and j. Note that

hence, det(hij(0)) ≠ 0 because the origin is a non-degenerate saddle point.
Let us show by induction that there are local coordinates u = (u1, ... un), z = ψ(u), 0 = ψ(0), such that
| (3) |

First, assume that there exist local coordinates y = (y1, ... yn), z = φ(y), 0 = φ(0), such that
| (4) |

where Hij is symmetric due to equation (2). By a linear change of the variables (yr, ... yn), we can assure that Hrr(0) ≠ 0. From the chain rule, we have

Therefore:

whence,

The matrix (Hij(0)) can be recast in the Jordan normal form: (Hij(0)) = LJL−1, were L gives the desired non-singular linear transformation and the diagonal of J contains non-zero eigenvalues of (Hij(0)). If Hij(0) ≠ 0 then, due to continuity of Hij(y), it must be also non-vanishing in some neighborhood of the origin. Having introduced , we write

![{\displaystyle {\begin{aligned}S({\boldsymbol {\varphi }}(y))=&y_{1}^{2}+\cdots +y_{r-1}^{2}+H_{rr}(y)\sum _{i,j=r}^{n}y_{i}y_{j}{\tilde {H}}_{ij}(y)\\=&y_{1}^{2}+\cdots +y_{r-1}^{2}+H_{rr}(y)\left[y_{r}^{2}+2y_{r}\sum _{j=r+1}^{n}y_{j}{\tilde {H}}_{rj}(y)+\sum _{i,j=r+1}^{n}y_{i}y_{j}{\tilde {H}}_{ij}(y)\right]\\=&y_{1}^{2}+\cdots +y_{r-1}^{2}+H_{rr}(y)\left[\left(y_{r}+\sum _{j=r+1}^{n}y_{j}{\tilde {H}}_{rj}(y)\right)^{2}-\left(\sum _{j=r+1}^{n}y_{j}{\tilde {H}}_{rj}(y)\right)^{2}\right]+H_{rr}(y)\sum _{i,j=r+1}^{n}y_{i}y_{j}{\tilde {H}}_{ij}(y)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c6897bd4bcd2f3e6b2ed9ee4a071351b07ec6522)
Motivated by the last expression, we introduce new coordinates z = η(x), 0 = η(0),

The change of the variables y ↔ x is locally invertible since the corresponding Jacobian is non-zero,
![{\displaystyle \left.{\frac {\partial x_{r}}{\partial y_{k}}}\right|_{y=0}={\sqrt {H_{rr}(0)}}\left[\delta _{r,\,k}+\sum _{j=r+1}^{n}\delta _{j,\,k}{\tilde {H}}_{jr}(0)\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/31789a60384c5526af564f02843e6aff3065930c)
Therefore,
| (5) |

Comparing equations (4) and (5), we conclude that equation (3) is verified. Denoting the eigenvalues of by μj, equation (3) can be rewritten as

| (6) |

Therefore,
| (7) |

From equation (6), it follows that . The Jordan normal form of reads , where Jz is an upper diagonal matrix containing the eigenvalues and det P ≠ 0; hence, . We obtain from equation (7)



![{\displaystyle \det S''_{ww}({\boldsymbol {\varphi }}(0))=\left[\det {\boldsymbol {\varphi }}'_{w}(0)\right]^{2}\det S''_{zz}(0)\Longrightarrow \det {\boldsymbol {\varphi }}'_{w}(0)=\pm 1.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64f03f4136b8cea03e8a7418fd989c79469d1250)
If , then interchanging two variables assures that .


The asymptotic expansion in the case of a single non-degenerate saddle point
editAssume
- f (z) and S(z) are holomorphic functions in an open, bounded, and simply connected set Ωx ⊂ Cn such that the Ix = Ωx ∩ Rn is connected;
- has a single maximum: for exactly one point x0 ∈ Ix;
- x0 is a non-degenerate saddle point (i.e., ∇S(x0) = 0 and ).



Then, the following asymptotic holds
| (8) |

where μj are eigenvalues of the Hessian and are defined with arguments


| (9) |

This statement is a special case of more general results presented in Fedoryuk (1987).[5]
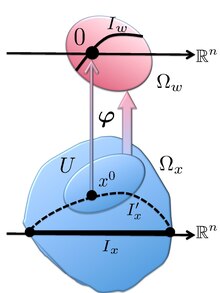
First, we deform the contour Ix into a new contour passing through the saddle point x0 and sharing the boundary with Ix. This deformation does not change the value of the integral I(λ). We employ the Complex Morse Lemma to change the variables of integration. According to the lemma, the function φ(w) maps a neighborhood x0 ∈ U ⊂ Ωx onto a neighborhood Ωw containing the origin. The integral I(λ) can be split into two: I(λ) = I0(λ) + I1(λ), where I0(λ) is the integral over , while I1(λ) is over (i.e., the remaining part of the contour I′x). Since the latter region does not contain the saddle point x0, the value of I1(λ) is exponentially smaller than I0(λ) as λ → ∞;[6] thus, I1(λ) is ignored. Introducing the contour Iw such that , we have




| (10) |
![{\displaystyle I_{0}(\lambda )=e^{\lambda S(x^{0})}\int _{I_{w}}f[{\boldsymbol {\varphi }}(w)]\exp \left(\lambda \sum _{j=1}^{n}{\tfrac {\mu _{j}}{2}}w_{j}^{2}\right)\left|\det {\boldsymbol {\varphi }}_{w}'(w)\right|dw.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e1b524ecff5b68963c862f2b2b85da2571de8042)
Recalling that x0 = φ(0) as well as , we expand the pre-exponential function into a Taylor series and keep just the leading zero-order term

![{\displaystyle f[{\boldsymbol {\varphi }}(w)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/65ee4f2688eb598e8e07a62c82271d65764e9f83)
| (11) |

Here, we have substituted the integration region Iw by Rn because both contain the origin, which is a saddle point, hence they are equal up to an exponentially small term.[7] The integrals in the r.h.s. of equation (11) can be expressed as
| (12) |

From this representation, we conclude that condition (9) must be satisfied in order for the r.h.s. and l.h.s. of equation (12) to coincide. According to assumption 2, is a negatively defined quadratic form (viz., ) implying the existence of the integral , which is readily calculated




Equation (8) can also be written as
| (13) |

where the branch of

is selected as follows

Consider important special cases:
- If S(x) is real valued for real x and x0 in Rn (aka, the multidimensional Laplace method), then[8]
- If S(x) is purely imaginary for real x (i.e., for all x in Rn) and x0 in Rn (aka, the multidimensional stationary phase method),[9] then[10] where denotes the signature of matrix , which equals to the number of negative eigenvalues minus the number of positive ones. It is noteworthy that in applications of the stationary phase method to the multidimensional WKB approximation in quantum mechanics (as well as in optics), Ind is related to the Maslov index see, e.g., Chaichian & Demichev (2001) and Schulman (2005).





The case of multiple non-degenerate saddle points
editIf the function S(x) has multiple isolated non-degenerate saddle points, i.e.,

where

is an open cover of Ωx, then the calculation of the integral asymptotic is reduced to the case of a single saddle point by employing the partition of unity. The partition of unity allows us to construct a set of continuous functions ρk(x) : Ωx → [0, 1], 1 ≤ k ≤ K, such that

Whence,

Therefore as λ → ∞ we have:

where equation (13) was utilized at the last stage, and the pre-exponential function f (x) at least must be continuous.
The other cases
editWhen ∇S(z0) = 0 and , the point z0 ∈ Cn is called a degenerate saddle point of a function S(z).

Calculating the asymptotic of

when λ → ∞, f (x) is continuous, and S(z) has a degenerate saddle point, is a very rich problem, whose solution heavily relies on the catastrophe theory. Here, the catastrophe theory replaces the Morse lemma, valid only in the non-degenerate case, to transform the function S(z) into one of the multitude of canonical representations. For further details see, e.g., Poston & Stewart (1978) and Fedoryuk (1987).
Integrals with degenerate saddle points naturally appear in many applications including optical caustics and the multidimensional WKB approximation in quantum mechanics.
The other cases such as, e.g., f (x) and/or S(x) are discontinuous or when an extremum of S(x) lies at the integration region's boundary, require special care (see, e.g., Fedoryuk (1987) and Wong (1989)).
Extensions and generalizations
editAn extension of the steepest descent method is the so-called nonlinear stationary phase/steepest descent method. Here, instead of integrals, one needs to evaluate asymptotically solutions of Riemann–Hilbert factorization problems.
Given a contour C in the complex sphere, a function f defined on that contour and a special point, say infinity, one seeks a function M holomorphic away from the contour C, with prescribed jump across C, and with a given normalization at infinity. If f and hence M are matrices rather than scalars this is a problem that in general does not admit an explicit solution.
An asymptotic evaluation is then possible along the lines of the linear stationary phase/steepest descent method. The idea is to reduce asymptotically the solution of the given Riemann–Hilbert problem to that of a simpler, explicitly solvable, Riemann–Hilbert problem. Cauchy's theorem is used to justify deformations of the jump contour.
The nonlinear stationary phase was introduced by Deift and Zhou in 1993, based on earlier work of the Russian mathematician Alexander Its. A (properly speaking) nonlinear steepest descent method was introduced by Kamvissis, K. McLaughlin and P. Miller in 2003, based on previous work of Lax, Levermore, Deift, Venakides and Zhou. As in the linear case, steepest descent contours solve a min-max problem. In the nonlinear case they turn out to be "S-curves" (defined in a different context back in the 80s by Stahl, Gonchar and Rakhmanov).
The nonlinear stationary phase/steepest descent method has applications to the theory of soliton equations and integrable models, random matrices and combinatorics.
Another extension is the Method of Chester–Friedman–Ursell for coalescing saddle points and uniform asymptotic extensions.
See also
editNotes
edit- ^ Bender, Carl M.; Orszag, Steven A. (1999). Advanced Mathematical Methods for Scientists and Engineers I. New York, NY: Springer New York. doi:10.1007/978-1-4757-3069-2. ISBN 978-1-4419-3187-0.
- ^ A modified version of Lemma 2.1.1 on page 56 in Fedoryuk (1987).
- ^ Lemma 3.3.2 on page 113 in Fedoryuk (1987)
- ^ Poston & Stewart (1978), page 54; see also the comment on page 479 in Wong (1989).
- ^ Fedoryuk (1987), pages 417-420.
- ^ This conclusion follows from a comparison between the final asymptotic for I0(λ), given by equation (8), and a simple estimate for the discarded integral I1(λ).
- ^ This is justified by comparing the integral asymptotic over Rn [see equation (8)] with a simple estimate for the altered part.
- ^ See equation (4.4.9) on page 125 in Fedoryuk (1987)
- ^ Rigorously speaking, this case cannot be inferred from equation (8) because the second assumption, utilized in the derivation, is violated. To include the discussed case of a purely imaginary phase function, condition (9) should be replaced by
- ^ See equation (2.2.6') on page 186 in Fedoryuk (1987)

References
edit- Chaichian, M.; Demichev, A. (2001), Path Integrals in Physics Volume 1: Stochastic Process and Quantum Mechanics, Taylor & Francis, p. 174, ISBN 075030801X
- Debye, P. (1909), "Näherungsformeln für die Zylinderfunktionen für große Werte des Arguments und unbeschränkt veränderliche Werte des Index", Mathematische Annalen, 67 (4): 535–558, doi:10.1007/BF01450097, S2CID 122219667 English translation in Debye, Peter J. W. (1954), The collected papers of Peter J. W. Debye, Interscience Publishers, Inc., New York, ISBN 978-0-918024-58-9, MR 0063975
- Deift, P.; Zhou, X. (1993), "A steepest descent method for oscillatory Riemann-Hilbert problems. Asymptotics for the MKdV equation", Ann. of Math., vol. 137, no. 2, The Annals of Mathematics, Vol. 137, No. 2, pp. 295–368, arXiv:math/9201261, doi:10.2307/2946540, JSTOR 2946540, S2CID 12699956.
- Erdelyi, A. (1956), Asymptotic Expansions, Dover.
- Fedoryuk, M. V. (2001) [1994], "Saddle point method", Encyclopedia of Mathematics, EMS Press.
- Fedoryuk, M. V. (1987), Asymptotic: Integrals and Series, Nauka, Moscow [in Russian].
- Kamvissis, S.; McLaughlin, K. T.-R.; Miller, P. (2003), "Semiclassical Soliton Ensembles for the Focusing Nonlinear Schrödinger Equation", Annals of Mathematics Studies, vol. 154, Princeton University Press.
- Riemann, B. (1863), Sullo svolgimento del quoziente di due serie ipergeometriche in frazione continua infinita (Unpublished note, reproduced in Riemann's collected papers.)
- Siegel, C. L. (1932), "Über Riemanns Nachlaß zur analytischen Zahlentheorie", Quellen und Studien zur Geschichte der Mathematik, Astronomie und Physik, 2: 45–80 Reprinted in Gesammelte Abhandlungen, Vol. 1. Berlin: Springer-Verlag, 1966.
- Translated in Barkan, Eric; Sklar, David (2018), "On Riemanns Nachlass for Analytic Number Theory: A translation of Siegel's Uber", arXiv:1810.05198 [math.HO].
- Poston, T.; Stewart, I. (1978), Catastrophe Theory and Its Applications, Pitman.
- Schulman, L. S. (2005), "Ch. 17: The Phase of the Semiclassical Amplitude", Techniques and Applications of Path Integration, Dover, ISBN 0486445283
- Wong, R. (1989), Asymptotic approximations of integrals, Academic Press.